Versão discreta da equação PID e Filtro digital
| Retorna para tópico anterior | Avança para próximo tópico |
O cálculo da integral e da derivada só é definido para sinais contínuos no tempo. No caso de sinais digitais, utilizam-se aproximações.
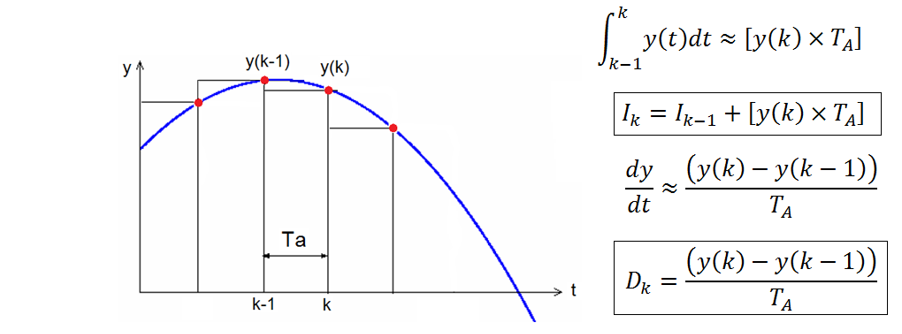
Para a ação integral, uma forma é a utilização da integração retangular. Nela, a integral (ou área) entre dois pontos é aproximada por um retângulo, cuja base é o tempo de amostragem e a altura é o valor do segundo ponto.
No caso da ação derivativa pode-se aproximar a derivada pela inclinação de uma reta que liga este ponto ao ponto anterior k-1.
Considere o sinal y(t) e duas amostras realizadas no instante k e no instante k-1. Utilizando a Integração Retangular e a Relação de Euller, temos que:
Aplicando as aproximações à equação de um controlador PID, temos:
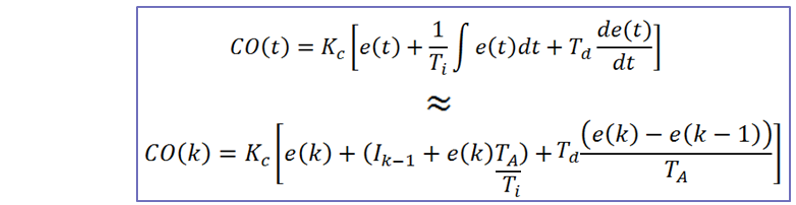
Chamamos de erro de aproximação a diferença do valor calculado pela relação discreta CO(k) do valor pela equação contínua CO(t). É importante notar que este erro será menor, quanto menor for o tempo de amostragem , ou seja:

Filtro Digital
Na seção anterior foi apresentada uma forma de aproximar o cálculo de funções matemáticas dinâmicas por meio de equações no tempo discreto. Essa mesma aproximação (retangular) pode ser estendida para qualquer função de transferência.
No tempo discreto, a dinâmica dos sinais digitais é representada por termos atrasados no tempo [y(k-1), y(k-2), …]. Os pólos da FT implicam em atrasos na saída, onde um atraso de tempo representa uma dinâmica de primeira ordem, dois atrasos de segunda ordem, e assim por diante. Já os zeros implicam em atrasos na entrada.

Chamamos esta técnica de “conversão” de uma função dinâmica contínua em uma equação discreta de discretização.
Considerando a relação Y(s)/X(x)=G(s), onde X(s) representa a entrada, Y(s) a saída e G(s) é uma função de transferência qualquer, a discretização de G(s) é obtida com o seguinte procedimento:
- Conversão do domínio S para o domínio Z: Substituir as funções X(s) e Y(s) respectivamente por X(z) e Y(z) e substituir cada operador de Laplace s de pela relação:

- Conversão do domínio Z para o domínio do tempo discreto: Essa conversão também é feita de maneira direta, observando as seguintes propriedades:
- Y(Z)→y(k) valor de na amostra atual
- Y(Z)×z-1→y(k-1) valor de na amostra anterior
- Y(Z)×z-2→y(k-2) valor de duas amostras anteriores
- ….
Obs: As mesmas transformações devem ser aplicadas à variável X(z)
- Isolar o termo Y(z) na equação.
Para exemplificar, considere a função de transferência de um filtro analógico de primeira ordem.
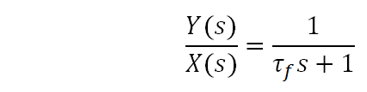
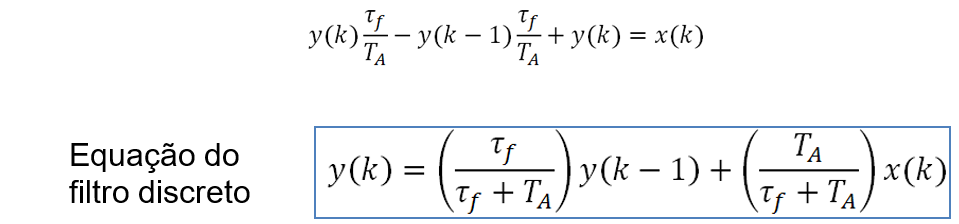
Fazendo a transformação para domínio “z” e multiplicando cruzado, temos:

E, fazendo a transformação para o domínio do tempo discreto e isolando y(k), temos: