Efeito do tempo morto no projeto λ-tun
O tempo morto é o principal limitador de desempenho em sistemas retroalimentados. Sua presença, associada a uma ação retroalimentada com ganho excessivo, torna uma malha de controle oscilatória ou até mesmo instável.
Isso pode ser demonstrado analisando a trajetória do lugar das raízes após inserir uma aproximação polinomial do efeito do tempo morto no processo. Considere a malha de controle abaixo:

Onde G(s) é uma função de transferência de primeira ordem, o controlador C(s) é do tipo PI com o zero coincidindo com o pólo de G(s) e o termo θ(s) é uma aproximação de Padè de ordem 1 para o tempo morto.

A figura a seguir apresenta o mapa S com o pólo de G(s) na cor amarela, pólo/zero de C(s) de azul e o pólo/zero da aproximação para o tempo morto de vermelho. Traçando o lugar das raíze, verifica-se que o polo do controlador não pode mais se deslocar livremente para a esquerda, pois em determinado momento ele irá “colidir” com o polo do tempo morto. A partir deste ponto os polos seguem trajetórias pelo espaço complexo e o sistema passa a responder com transitória oscilatório.
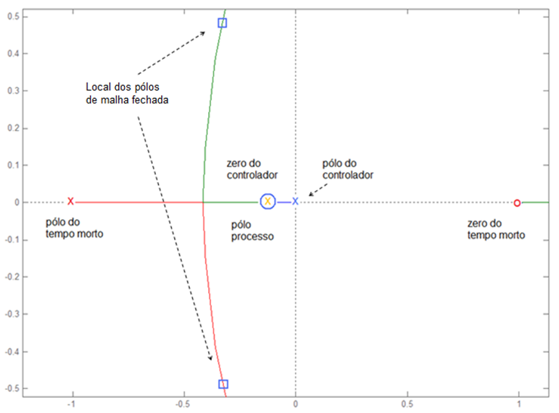
Ainda observando o traçado do lugar das raízes, conclui-se que o melhor desempenho é alcançado no ponto onde os polos (do tempo morto e do controlador) se encontram. Neste ponto o sistema apresenta resposta estável e sobreamortecida e seu polo mais a direta está na sua maior distância em relação ao eixo vertical.
Tomando-se a FT de malha fechada e substituindo as relações G(s) e C(s), temos:

Considerando que no ponto de melhor desempenho as raízes da equação característica de malha fechada são reais negativas e iguais, λ deve ser tal que o Δ da equação característica seja nulo:
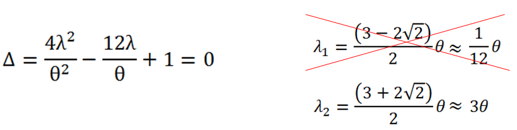
Ao substituir os valores de λ1 e λ2 na equação característica, verificamos que λ1 resulta em raízes positivas enquanto λ2 resulta em raízes negativas. Portanto, a relação λ = 3θ, resulta em polos em malha fechada iguais e negativos, ou seja, uma resposta temporal sobreamortecida com o menor tempo de resposta possível.
Consideração sobre estabilidade
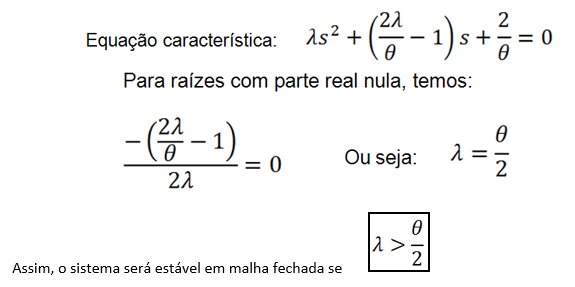
Observando novamente o lugar das raízes, vemos que os polos complexos de malha fechada tendem a atravessar para o semiplano direito a partir de certo valor de ganho, tornando o sistema instável.
Quando os polos complexos estão no limite de estabilidade (sobre o eixo imaginário) a parte real das raízes da equação característica é nula, e assim: