Compensação direta
| Retorna para tópico anterior | Conteúdo deste tópico – Projeto via modelagem empírica – Projeto via modelo conceitual – Considerações de Projeto |
Avança para próximo tópico |
É um elo de controle que compensa o efeito de perturbações na variável de processo utilizando uma variável de antecipação. Este sinal alimenta um compensador dinâmico que gera a ação feedforward, que irá atuar no processo em paralelo com a ação feedback.
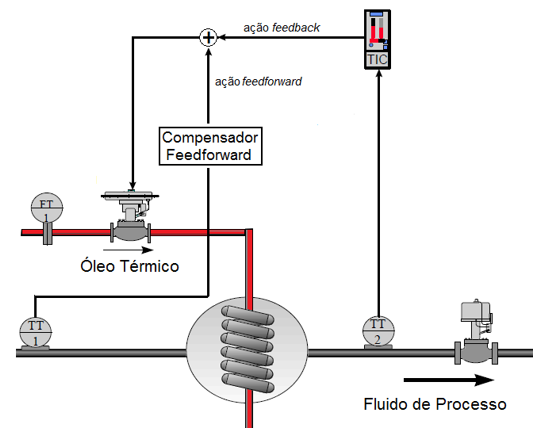
Para exemplificar, considere o processo com trocador de calor, onde a temperatura em TT2 é controlada por TIC, que atua na vazão de óleo térmico. A temperatura de chegada do fluído de processo é medida antecipadamente por TT1, e sua medida é utilizada em conjunto com um compensado para gerar a ação feedforward.
Dessa forma, uma eventual variação na temperatura de chegada do fluido é percebido antecipadamente por TT1 e uma ação compensadora é gerada para a posição da válvula. Ou seja, antes do distúrbio afetar a temperatura em TT2, ele já estará sendo compensado antecipadamente pela ação feedforward.
Projeto via modelagem empírica
O projeto é baseado na função de transferência do processo G(s) e na função de transferência do distúrbio D(s). Este último consiste na relação dinâmica entre a variável de antecipação e variável controlada (PV). O compensador feedforward (CFF) é projetado baseado nestas funções de transferência de maneira a produzir uma ação de controle capaz de anular todo o impacto de D(s) na variável controlada. Esta ideia é ilustrada na figura abaixo. O caminho em vermelho representa o efeito da perturbação na variável controlada, enquanto que o caminho azul representa o efeito da ação compensadora. CFF é projetado de maneira que a ação compensadora anule o efeito da perturbação.
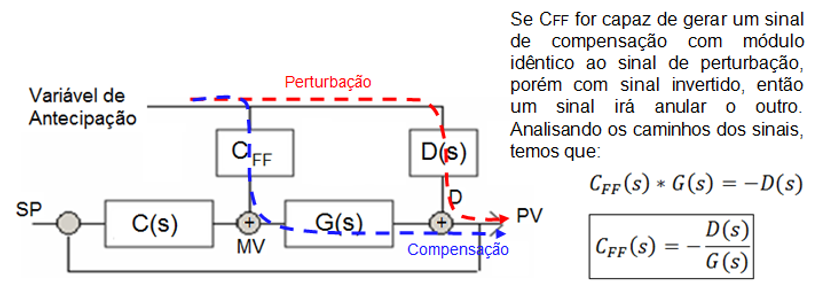
Considerando modelos do tipo primeira ordem com tempo morto, tanto para G(s), como para D(s), então temos que:

Assim o compensador é uma função de transferência com os seguintes parâmetros:
- Ganho => ganho de D(s) / ganho de G(s)
- Zero (lead) => constante de tempo de G(s)
- Pólo (lag) => constante de tempo de D(s)
- Tempo morto => tempo morto de D(s) – tempo morto de G(s)
Projeto via modelo conceitual
A ação compensadora é projetada para neutralizar um distúrbio que gera um desequilíbrio no processo, tal como um desvio no balanço de massa, de energia ou de composição. A ação feedforward utiliza uma medição de antecipação e uma equação de equilíbrio para cálculo da ação compensadora.
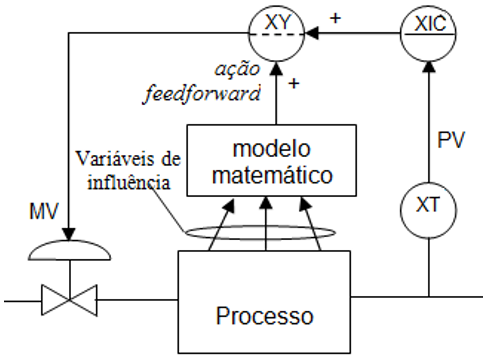
Para exemplificar uma aplicação de balanço de energia, suponha que é possível calcular a quantidade de calor perdido por um forno durante a abertura de uma porta. Uma vez conhecido o instante de abertura desta porta, uma ação feedforward é gerada abrindo a válvula de combustível no momento e na quantidade exata para repor o calor perdido pela porta.
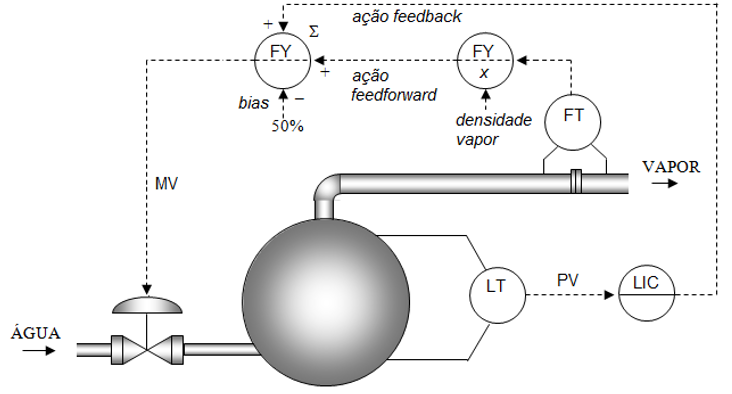
Um segundo exemplo, dessa vez de balanço de massa, é uma estratégia comumente utilizada no controle de nível de caldeiras. O nível do tubulão estará estável se a vazão mássica de entrada for modificada de maneira a equalizar flutuações na demanda (massa de água contida no vapor consumido). Esta estratégia é ilustrada na figura abaixo.
Considerações de Projeto
Requisitos:
- instrumento para medição da variável de antecipação;
- o tempo morto de D(s) deve ser maior que o tempo morto de G(s) (“antecipação deve ser maior que o atraso de atuação”).
Procedimento (Modelo empírico):
- Chavear o controlador feedback para modo manual
- Forçar uma variação na variável de antecipação e observar seu efeito em PV. Utilizando alguma técnica de modelagem, obter a F.T. D(s) = PV(s) / D(s).
- Se não é possível forçar uma variação na variável de antecipação, então buscar registro histórico das variáveis e aplicar uma técnica de análise de série temporal.
- Calcular os parâmetros do compensador dinâmico (CFF)
- Calculo do “Bias”. O “Bias” é um valor constante somado na saída do compensador com o intuito de remover o valor médio.
![]()